Kitsa joonelaiusega laserite väljatöötamisel kuni tänapäevani on laseri tagasiside mehhanismide areng olnud sünonüüm laserresonaatoristruktuuride arenguga. Allpool tutvustatakse erinevaid kitsa joonelaiusega lasertehnoloogiate konfiguratsioone laserresonaatorite arengu järjekorras.
Ühe põhiõõnsusega lasereid saab struktuurselt jagada lineaarseteks õõnsusteks ja rõngasõõnsusteks ning õõnsuse pikkuse järgi lühikese õõnsusega ja pika õõnsusega struktuurideks. Lühikese õõnsusega laseritel on suur pikisuunaline režiimide vahe, mis on soodsam ühe pikisuunalise režiimi (SLM) töö saavutamiseks, kuid neil on lai sisemise õõnsuse joonelaius ja raskused müra summutamisel. Pika õõnsusega struktuuridel on oma olemuselt kitsad joonelaiuse omadused ja need võimaldavad integreerida erinevaid paindliku konfiguratsiooniga optilisi seadmeid; nende tehniline väljakutse seisneb aga SLM-i töö saavutamises liiga väikese pikisuunalise režiimivahe tõttu.
Laseri põhiõõnsuste klassikalise konfiguratsioonina pakub lineaarne õõnsus eeliseid, nagu lihtne struktuur, kõrge efektiivsus ja lihtne manipuleerimine. Ajalooliselt loodi esimene tõeline laserkiir F-P lineaarse õõnsuse struktuuri abil. Tänu teaduse ja tehnoloogia edasisele arengule on F-P struktuur laialdaselt kasutusele võetud pooljuhtlaserites, kiudlaserites ja pooljuhtlaserites.
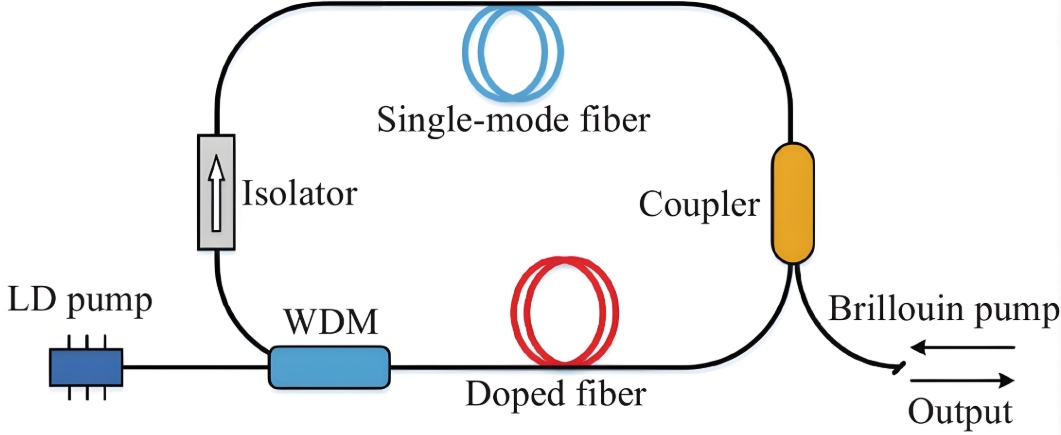
Rõngasõõnsus on klassikalise lineaarse õõnsuse modifikatsioon, mis ületab lineaarsete õõnsuste ruumiliste aukude põletamise puuduse, asendades seisvalaine väljad liikuvate lainetega, et saavutada optiliste signaalide tsükliline võimendus. Kiudoptiliste seadmete arendamise tõttu on painduvate kiudstruktuuridega kiudlaserid pälvinud suurt tähelepanu ja neist on viimase kahe aastakümne jooksul saanud kõige kiiremini kasvav laserite kategooria.
Mittetasapinnalised ringostsillaatori (NPRO) laserid esindavad spetsiaalset liikuva laine laserkonfiguratsiooni. Tavaliselt koosneb selliste laserite põhiõõnsus monoliitsest kristallist, mis reguleerib laseri polarisatsiooni olekut kristalli otspinna peegelduse ja välise magnetvälja kaudu, et realiseerida laseri ühesuunaline töö. See disain vähendab oluliselt laserresonaatori termilist koormust, tagab erakordse lainepikkuse ja võimsuse stabiilsuse ning kitsa joonelaiuse omadused.
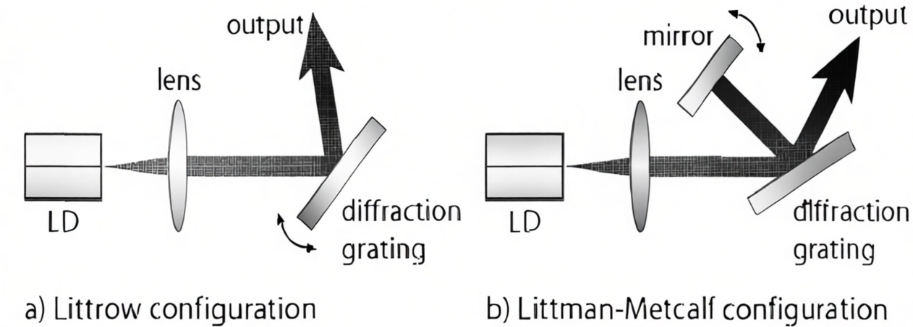
Selliste tegurite tõttu nagu liiga lühike õõnsuse pikkus ja suur sisemine kadu, kannatavad õõnessisesel tagasisidel põhinevad FP lineaarse õõnsusega üheõõnsusega laserkonfiguratsioonid piiratud footonite interaktsiooniaja ja võimenduskeskkonna spontaanse emissiooni kõrvaldamise raskustega. Selle probleemi lahendamiseks pakkusid teadlased välja ühe välise õõnsuse tagasiside konfiguratsiooni. Väline õõnsus pikendab footonite interaktsiooni aega ja suunab filtreeritud footonid tagasi põhiõõnde, optimeerides seeläbi laseri jõudlust ja surudes kokku joonelaiust. Varased lihtsad ruumilise optikaga välised õõnsused struktuurid, nagu Littrow ja Littmani konfiguratsioonid, kasutavad võrede spektraalset hajutamise võimet, et süstida laseri põhiõõnde uuesti puhastatud lasersignaale, avaldades põhiõõnsusele sageduse tõmbamist, et saavutada joonelaiuse tihendus. Seda ühtset välisõõnsusega struktuuri laiendati hiljem kiudlaseritele ja pooljuhtlaseritele.
Ühe välisõõnsusega tagasiside laserkonfiguratsioonide tehniline väljakutse seisneb välisõõne ja põhiõõnsuse faaside sobitamises. Uuringud on näidanud, et välise õõnsuse tagasisidesignaali ruumiline faas on laseri läve, sageduse ja suhtelise väljundvõimsuse määramisel kriitilise tähtsusega ning laseri pikisuunalised režiimid on väga tundlikud tagasisidesignaali intensiivsuse ja faasi suhtes.
DBR laseri konfiguratsioon
Lasersüsteemide stabiilsuse suurendamiseks ja lainepikkuse selektiivsete seadmete integreerimiseks põhiõõnsuse struktuuri töötati välja DBR konfiguratsioon. F-P resonaatoril põhinev DBR-resonaator asendab F-P struktuuri peeglid perioodiliste passiivsete Braggi struktuuridega, et pakkuda optilist tagasisidet. Braggi struktuuri perioodilise kammfiltrimise mõju tõttu laserihäirete režiimidele on DBR-i põhiõõnsus oma olemuselt filtreerimisomadused. Koos lühikese õõnsusega struktuuri pakutava suure pikisuunalise režiimi vahega on SLM-i töö hõlpsasti saavutatav. Kuigi perioodiline Braggi struktuur oli algselt kavandatud ainult lainepikkuse valimiseks, esindab see õõnsuse struktuuri vaatenurgast ka ühe õõnsusega struktuuri arengut koos suurenenud tagasisidepindade arvuga.
DBR-laserid, mis on klassifitseeritud võimenduskeskkonna järgi, hõlmavad pooljuhtlasereid ja kiudlasereid. Pooljuhtlaseritel on loomulik eelis pooljuhtmaterjalide ja mikro-nanotöötlustehnoloogiate valmistamisel. Pooljuhtlaserite uurimisel ja valmistamisel saab vahetult rakendada paljusid pooljuhtide tootmisprotsesse, nagu sekundaarne epitakseerimine, keemiline aurustamine-sadestamine, astmeline fotolitograafia, nanoimprintimine, elektronkiirega söövitamine ja ioonsöövitus.
DBR-kiudlaserid tekkisid hiljem kui DBR-pooljuhtlaserid, mida piiras peamiselt kiudlainejuhitöötluse ja suure kontsentratsiooniga mitme dopingutehnoloogia areng. Praegu hõlmavad levinumad kiudude lainejuhi valmistamise tehnikad hapnikudefektiga faasimaskimist ja femtosekundilist lasertöötlust, samas kui suure kontsentratsiooniga kiuddopingutehnoloogiad hõlmavad modifitseeritud keemilist aurustamist (MCVD) ja pinnaplasma keemilist aurustamist (SCVD).
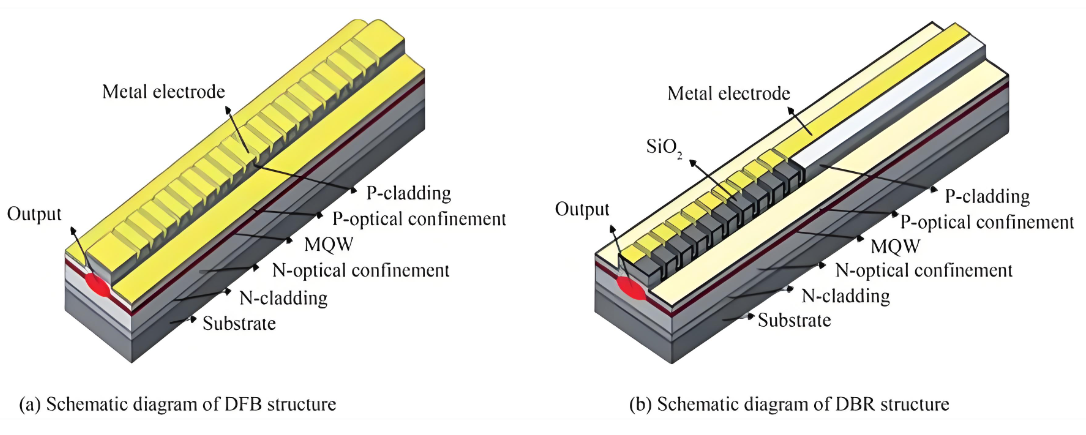
Teine Braggi võretel põhinev resonaatoristruktuur on DFB konfiguratsioon. DFB laseri põhiõõnsus integreerib Braggi struktuuri aktiivse piirkonnaga ja lisab lainepikkuse valimiseks struktuuri keskele faasinihke piirkonna. Nagu on näidatud joonisel 3(b), on sellel konfiguratsioonil suurem integreerituse ja struktuuriühtsus ning see leevendab selliseid probleeme nagu tõsine lainepikkuse triiv ja režiimide hüppamine DBR-struktuurides, muutes selle praeguses etapis kõige stabiilsemaks ja praktilisemaks laserkonfiguratsiooniks.
DFB laserite tehniline väljakutse seisneb võrekonstruktsioonide valmistamises. DBR-pooljuhtlaserites on võre valmistamiseks kaks peamist meetodit: sekundaarne epitaks ja pinna söövitamine. Regrown griting feedback (RGF)-DFB pooljuhtlaserid kasutavad sekundaarset epitaksit ja fotolitograafiat, et kasvatada aktiivses piirkonnas madala murdumisnäitajaga võre komplekti. See meetod säilitab aktiivse kihi struktuuri madala kaoga, hõlbustades kõrge Q resonaatorite valmistamist. Pinnavõre (SG)-DFB pooljuhtlaserid hõlmavad võrekihi otsest söövitamist aktiivse piirkonna pinnale. See lähenemisviis on keerulisem, nõudes täpset reguleerimist vastavalt aktiivse piirkonna materjalile ja dopingu ioonidele ning sellel on suurem kadu, kuid pakub siiski tugevamat optilist piiramist ja suuremat režiimi summutamise võimet.
Sarnaselt DBR-kiudlaseritega toetuvad DFB kiudlaserid kiu lainejuhi töötlemise ja suure kontsentratsiooniga legeeritud kiudtehnoloogia edusammudele. Võrreldes DBR-kiudlaseritega, kujutavad DFB-kiudlaserid endast suuremaid väljakutseid võre valmistamisel haruldaste muldmetallide ioonide lainepikkuse neeldumisomaduste tõttu.
Lühikese õõnsusega põhiõõnsusega laseritel, nagu DFB ja DBR, on piiratud õõnsusesisese footoni interaktsiooniaeg, mis muudab sügava joonelaiuse tihendamise keeruliseks. Joonelaiuse edasiseks tihendamiseks ja müra summutamiseks kombineeritakse sellised lühikese õõnsusega põhiõõnsuse konfiguratsioonid jõudluse optimeerimiseks sageli välise õõnsuse struktuuridega. Levinud välisõõnsuste struktuurid hõlmavad ruumilisi välisõõnsusi, fiiberväliseid õõnsusi ja lainejuhi välisõõnsusi. Enne fiiberoptiliste seadmete ja lainejuhtstruktuuride väljatöötamist koosnesid välised õõnsused valdavalt ruumilisest optikast, mis olid kombineeritud diskreetsete optiliste komponentidega. Nende hulgas kasutavad võrepõhised ruumilised välisõõnsuse tagasisidestruktuurid peamiselt Littrow ja Littmani kujundust, mis tavaliselt koosnevad laservõimenduse õõnsusest, ühendusläätsedest ja difraktsioonivõrest. Võre tagasisideelemendina võimaldab lainepikkuse häälestamist, režiimi valimist ja joonelaiuse tihendamist.
Lisaks võivad ruumilised välisõõnsusega tagasisidestruktuurid sisaldada mitmesuguseid optilisi filtreerimisseadmeid, nagu F-P etalonid, akusto-optilised/elektro-optilised häälestatavad filtrid ja interferomeetrid. Nendel filtreerimisseadmetel on oma olemuselt režiimi valimise võimalused ja need võivad asendada reste; teatud kõrge Q F-P etalonid edestavad isegi peegeldavaid võreid spektri kitsendamise ja joonelaiuse tihendamise osas.
Kiudoptiliste seadmete tehnoloogia edenedes on ruumiliste optiliste struktuuride asendamine väga integreeritud tugevate kiudlainejuhtide või kiudseadmetega tõhus strateegia lasersüsteemi stabiilsuse parandamiseks. Fiber välised õõnsused konstrueeritakse tavaliselt kiudseadmete ühendamise teel, et moodustada kogu kiud sisaldav struktuur, mis pakub suurepärast integreeritust, hõlpsat hooldust ja tugevat häiretekindlust. Kiudude välise õõnsuse tagasisidestruktuurid võivad olla lihtsad kiudahela tagasisidega või ainult kiudresonaatorid, FBG-d, kiu F-P õõnsused ja WGM-resonaatorid.
Kitsa joonelaiusega laserid integreeritud lainejuhi välise õõnsuse tagasisidestruktuuridega on pälvinud laialdast tähelepanu tänu oma väiksemale pakendi suurusele ja stabiilsemale jõudlusele. Põhimõtteliselt järgib lainejuhi välisõõnsuse tagasiside samu tehnilisi põhimõtteid nagu kiudude välisõõnsuse tagasiside, kuid pooljuhtmaterjalide mitmekesisus ja mikro-nanotöötlustehnoloogiad võimaldavad kompaktsemaid ja stabiilsemaid lasersüsteeme, suurendades lainejuhi välisõõnsusega tagasisidega kitsa joonelaiusega laserite praktilisust. Tavaliselt kasutatavad pooljuhtlasermaterjalid hõlmavad Si, Si₃N4 ja III-V ühendeid.
Optoelektrooniline võnkelaseri konfiguratsioon on spetsiaalne tagasisidelaseri arhitektuur, kus tagasisidesignaaliks on tavaliselt elektriline signaal või samaaegne optoelektrooniline tagasiside. Varaseim laserite puhul rakendatud optoelektrooniline tagasisidetehnoloogia oli PDH sageduse stabiliseerimise tehnika, mis kasutab elektrilist negatiivset tagasisidet õõnsuse pikkuse reguleerimiseks ja lasersageduse lukustamiseks võrdlusspektritele, nagu kõrge Q resonaatori režiimid ja külma aatomi neeldumisjooned. Negatiivse tagasiside häälestamise abil suudab laserresonaator sobitada laseri tööolekut reaalajas, vähendades sageduse ebastabiilsust suurusjärgus 10-117. Elektriline tagasiside kannatab aga oluliste piirangute all, sealhulgas aeglane reageerimiskiirus ja liiga keerulised servosüsteemid, mis hõlmavad ulatuslikku vooluringi. Need tegurid põhjustavad lasersüsteemide jaoks suuri tehnilisi raskusi, ranget juhtimistäpsust ja kõrgeid kulusid. Lisaks piirab süsteemi tugev sõltuvus võrdlusallikatest laseri lainepikkust rangelt kindlate sageduspunktidega, piirates veelgi selle praktilist rakendamist.
Autoriõigus @ 2020 Shenzhen Box Optronics Technology Co., Ltd. – Hiina kiudoptilised moodulid, fiiberoptiliste laserite tootjad, laserikomponentide tarnijad. Kõik õigused kaitstud.